Mari: scaling BLE to 1,000 robots
Sep 22, 2025
·
2 min read
 Mari — Micro-Robot Access Radio Infrastructure
Mari — Micro-Robot Access Radio Infrastructure
What it is
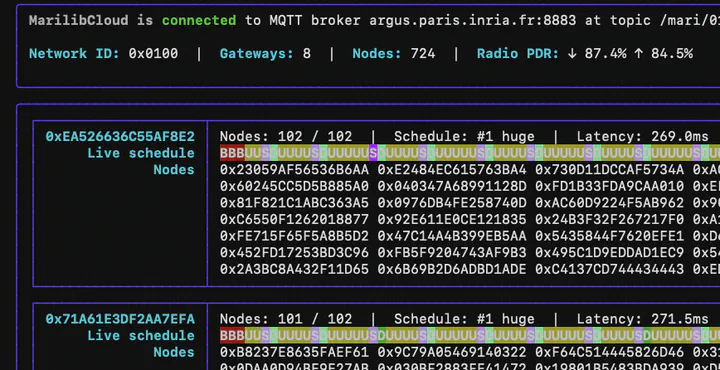
Mari (Micro-Robot Access Radio Infrastructure) is a custom wireless link layer that scales Bluetooth Low Energy (BLE) to 100 nodes per gateway. It runs baremetal C on Nordic nRF52/nRF53 chips and replaces the whole BLE stack above the radio: connection setup, scheduling, association, handover. The result is a purpose-built radio fabric for dense, real-time, mobile IoT.
What I built
I designed and implemented Mari end-to-end as Lead Research Engineer at Inria Paris:
- Slot frame and TSCH scheduler — TDMA + frequency hopping across 40 BLE channels, 1.7 ms slots
- Multi-gateway architecture — capacity-aware gateway selection, parallel RSSI monitoring, sub 50 ms handover with hysteresis
- Join / association protocol — IDLE → SCANNING → SYNCED → JOINING → JOINED, with backoff
- Firmware — baremetal C on Nordic nRF52833 / nRF52840 / nRF5340
- Marilib — Python host library for messaging and telemetry, enabling integration with tools for OTAP on the 1,000 DotBot testbed
- First author on the journal paper and the EWSN demo
Why it’s hard
At hundreds of robots, off-the-shelf BLE simply doesn’t fit:
- BLE GATT is limited to roughly 7–32 connections per host
- WiFi collapses under collisions in dense, mobile scenarios
- 6TiSCH / SmartMesh don’t meet mobility with sub-second latency requirements
Mari rebuilds everything above the BLE radio: a deterministic TSCH scheduler, a join state machine, and a multi-gateway design - all using only 20 kB of RAM.
Numbers
- 100 nodes per gateway, several gateways per testbed
- <0.3 s end-to-end latency, >90% packet delivery ratio, <50 ms handovers
- Deployed at 700+ robots in the DotBots Testbed
- 🏆 Best Demo Award, EWSN 2025 — a 120-device live demo
- 426 commits, 6 releases (latest v0.8.0, Jan 2026) - open source
Publications
- Mari: Responsive Wireless Communication for Low-Power Large-Scale Robot Swarms. G. Fedrecheski, Y. Gao, F. Maksimovic, A. Abadie, M. Vučinić, T. Chang, T. Watteyne. Ad Hoc Networks Journal, to appear. [Preprint]
- Demo: Mari Allows Connecting Large Scale Robot Swarms over BLE using TSCH with Fast Handovers and Multiple Independent Gateways. G. Fedrecheski, A. Abadie, M. Vučinić, F. Maksimovic, S. Alvarado-Marin, T. Watteyne. EWSN 2025, Leuven, Belgium. 🏆 Best Demo Award. [PDF]
Links
- Mari firmware (GitHub) — baremetal C
- Marilib host library (GitHub) — Python
- Documentation (wiki)